
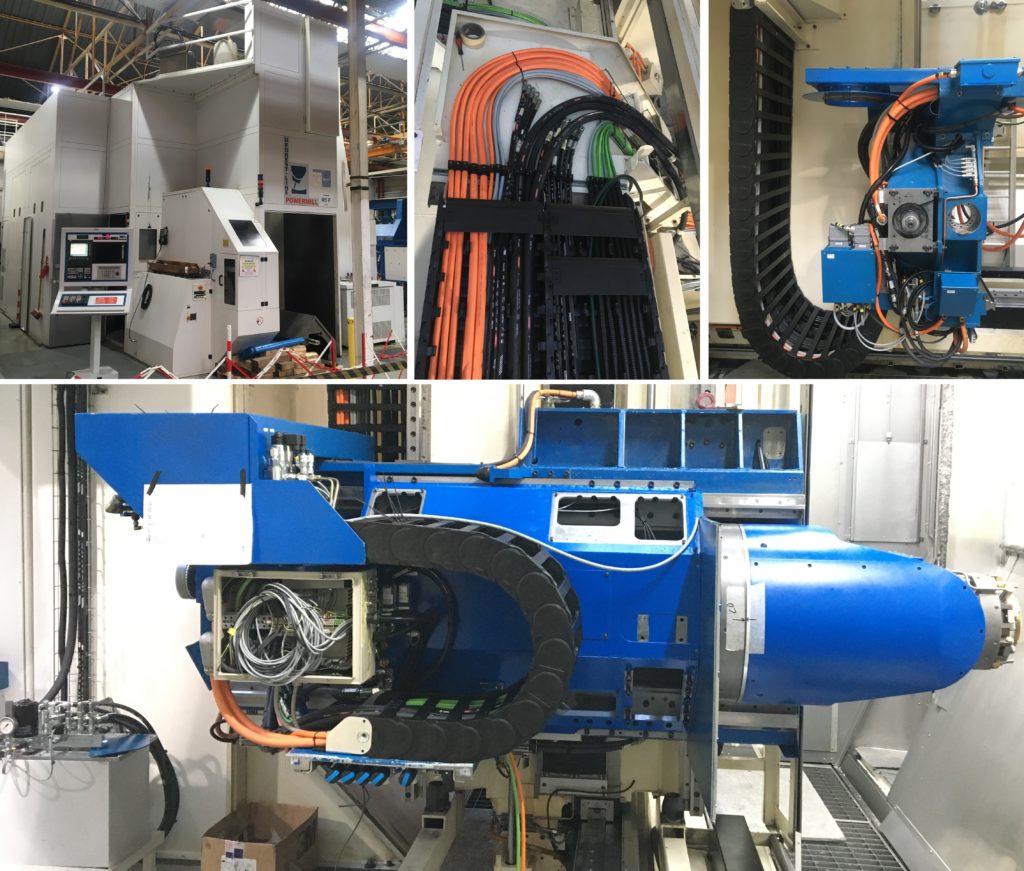


La cellule est pilotée par 2 commandes numériques :
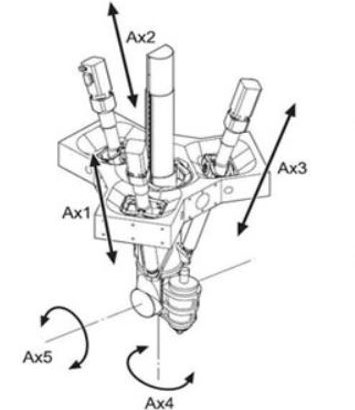 Un robot « Tricept » 5 axes comprenant 3 vérins de translation et 2 axes poignets de rotation piloté par un CN 840D.
Un robot « Tricept » 5 axes comprenant 3 vérins de translation et 2 axes poignets de rotation piloté par un CN 840D.- Et une CN 840D qui pilote la traverse et les 2 bras de fenêtrage.
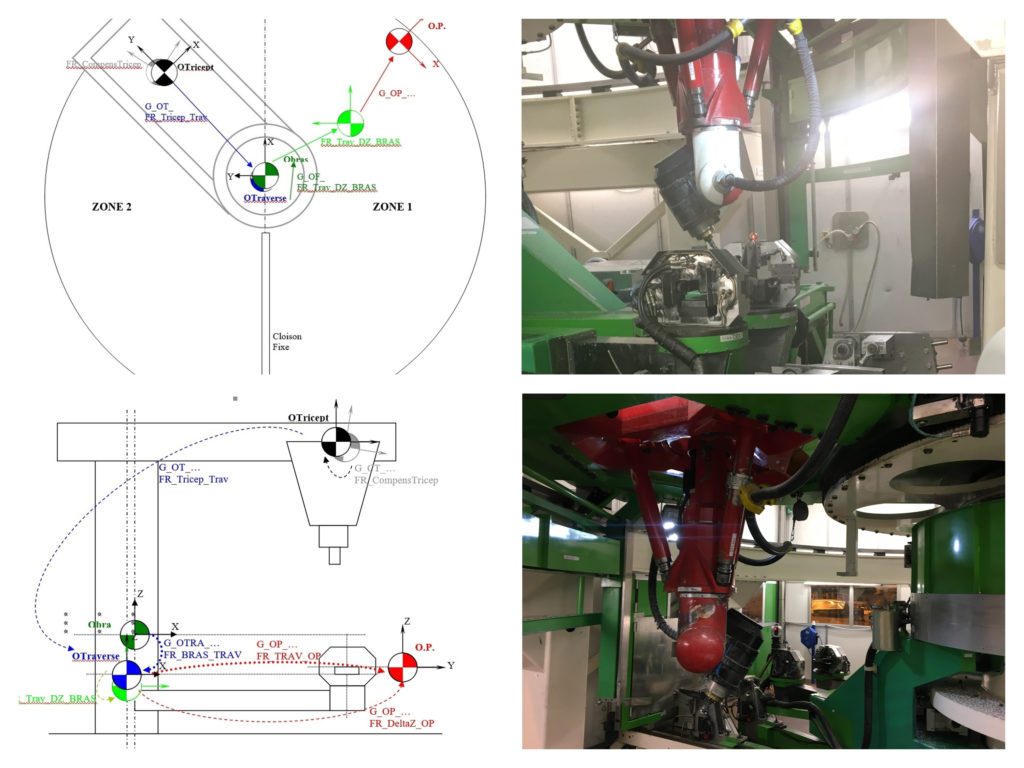
– Relevé géométrique complet robot + Traverse + Fenêtrage au laser Tracker.
– Mise en place de table de compensation inter-Axes.
– Réglage RTCP / points de pivots du robot.
– Mesure et calcul des décalages d’origines
- OT : Origine machine du Tricept
- OM : Origine machine de la traverse et des bras
- OG : Origine gabarit
- OP : Origine pièce


